Common Base Module
R&D Content
Common Base Module
| Actuation Module | Whole Body | Specific Local Body Organ | Digestive System |
|---|---|---|---|
| Select according to affected area | A1Mobile Electromagnetic Actuation |
A2Fixed Electromagnetic Actuation A3Robotic Electromagnetic Actuation A4Ultrasonic Actuation |
A5Self-Actuation |
| Recognition Visualization by Target | By disease | |||
|---|---|---|---|---|
| Solid Cancer | Circulatory Disease | Digestive Disease | Additional Disease | |
V1Meso-scale Recognition Module |
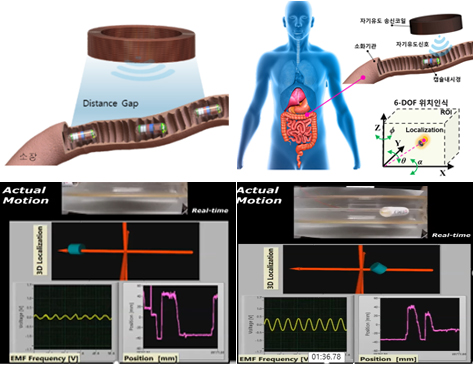
- Application of diagnosis/treatment module on digestive organs - Mechanical surgical procedure of micro medical robot |
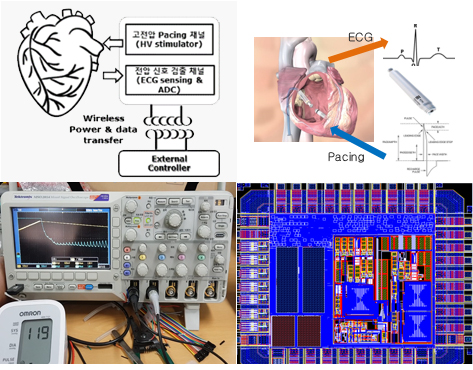
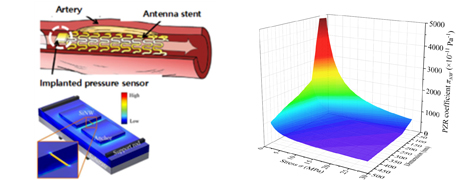
D1Pacemaker Diagnosis D2Hemodynamic Diagnosis |
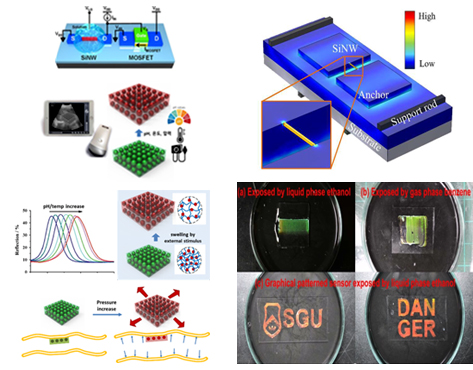
D3Compound Eye Diagnosis D4Intestine Measurement Diagnosis D5Hemostatic Patch D6Microbial Collection Delivery D7Reconfigurable Assembly |
- Musculoskeletal Disease - Human Body Insertion Micro Robot |
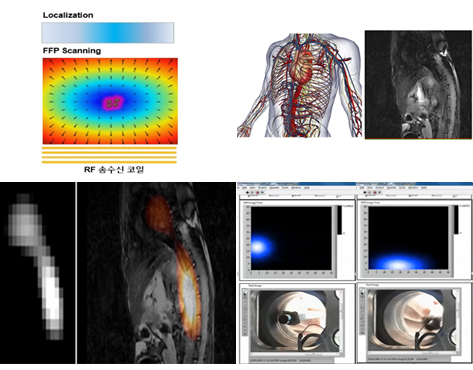
V2Micro-scale Recognition Module |
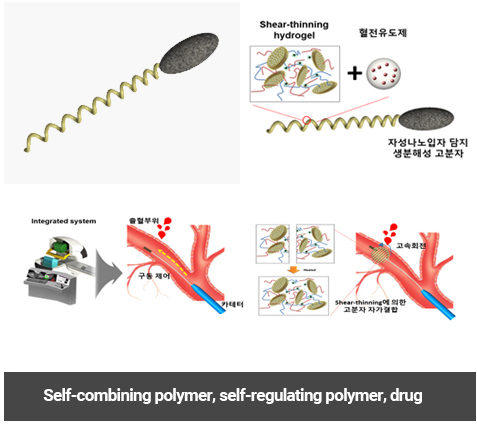
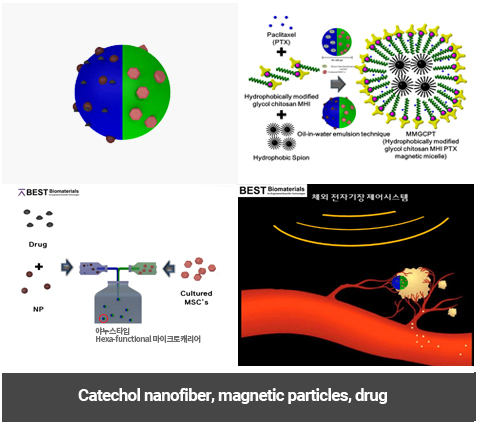
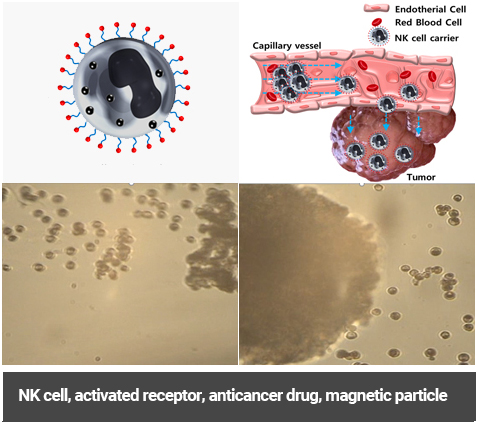
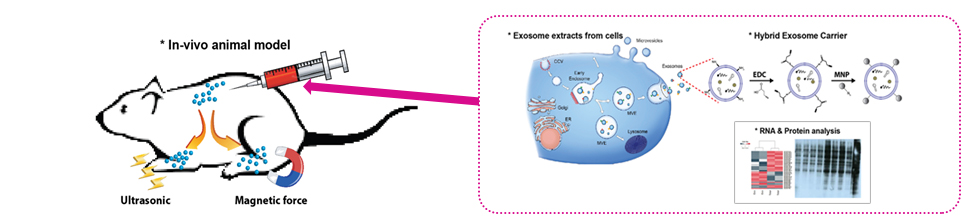
C1Tumor Embolism Carrier C3Janus Drug Carrier C4NK Cell Carrier |
C1Hemorrhagic Embolism |
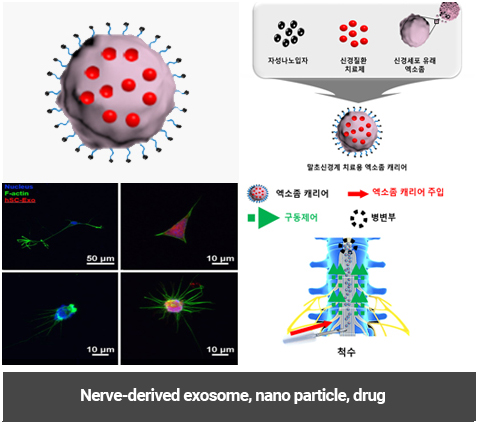
C5Exosome Carrier (Neurological Disease) |
|
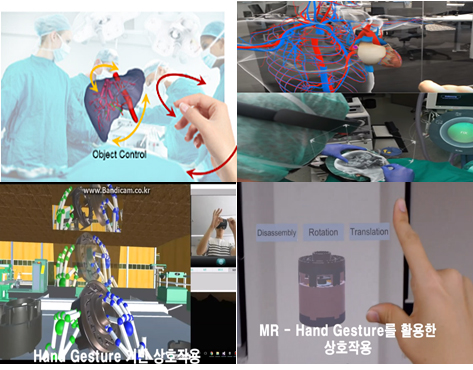
| Integrated System | V3Mixed Reality Visualization Module |
|||

Actuation Module (A1~A5)
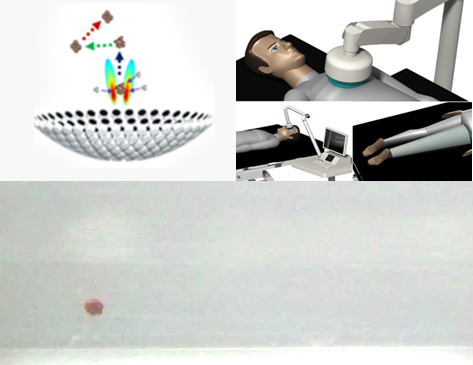
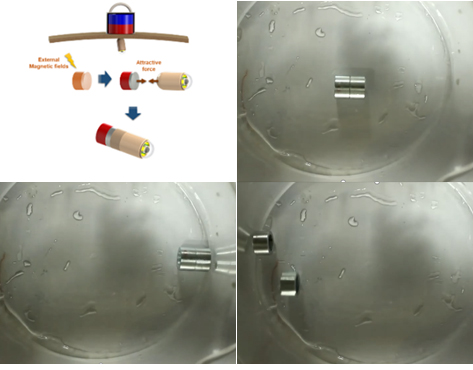
A1 Mobile Electromagnetic Actuation
- The most reliable technology at the current technology level
- Development direction: Lightweight system (4 ~ 8 ton → 1 ton), customized open structure (easy access for the medical team)
- Whole body application
- Large driving force, 6 degrees of freedom
- Electromagnetism amplifying electromagnet
- Multiple degrees of freedom movement mechanism
- Magnetic-focusing and control technology
- Application of prototype for circulation type
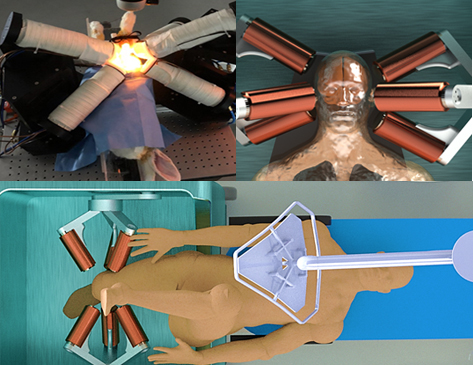
A2 Fixed Electromagnetic Actuation
- The most reliable technology at the current technology level
- Development direction: Lightweight system (4 ~ 8 ton → 1 ton), customized open structure (easy access for the medical team)
- Affected body part application
- Small system, 3 degrees of freedom
- Local electromagnetic amplification technology
- Optimal placement technique of driver
- Cooling technique
- Application of prototype for solid cancer
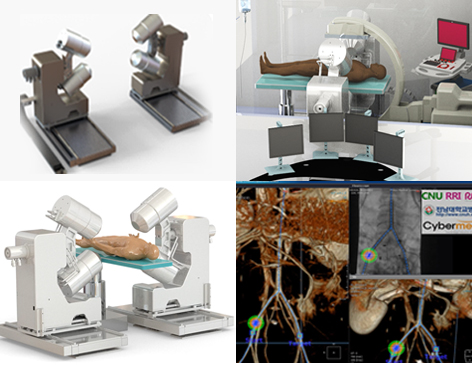
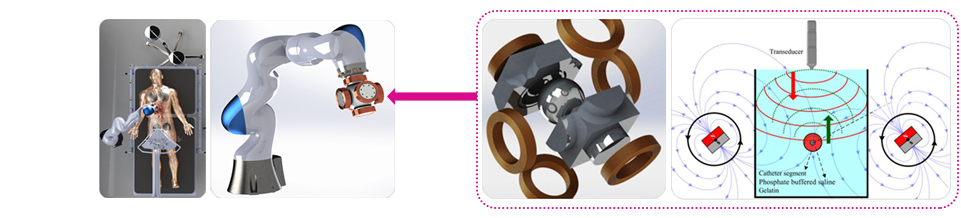
A3 Robot Electromagnetic Actuation
- The most reliable technology at the current technology level
- Development direction: Lightweight system (4 ~ 8 ton → 1 ton), customized open structure (easy access for the medical team)
- Affected body part application
- Limited 5 degrees of freedom
- Single magnetic amplification coil
- Medical Team collaboration drive robot
- Application of prototype for digestion type
A3 Robot Electromagnetic Actuation

Korea Institute of Medical Microroboticss
- Manufacture of Compact Spherical Electromagnetic Actuator
- Manufacture of Secondary Prototype (performance test type)
- Animal test
Overseas Joint Research Ⅰ
Prof. Sarthak Misra (University of Twente, Netherland)
- Small Spherical Electromagnetic Actuator
- current-magnetic field mapping
- Localization with Hall sensor
- Controller Development and In-vitro Experiment
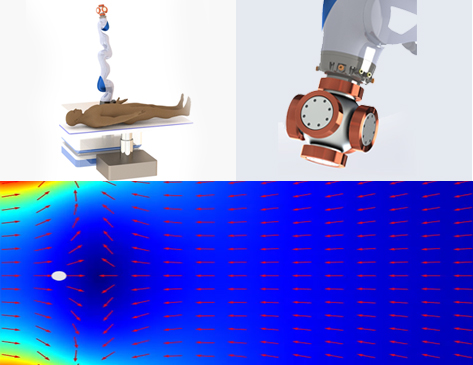
A4 Ultrasonic Actuation Module
- Non-magnetic robot control core drive module
- Most reliable technology in the next 10 years
- Microcarrier focusing and drive
- Ultralight portable drive module
- Unidirectional array ultrasonic transducer
- Robot trapping and movement control technology
- Ultrasonic TR external drive technology
- Carrier-driven prototype application for solid cancer treatment
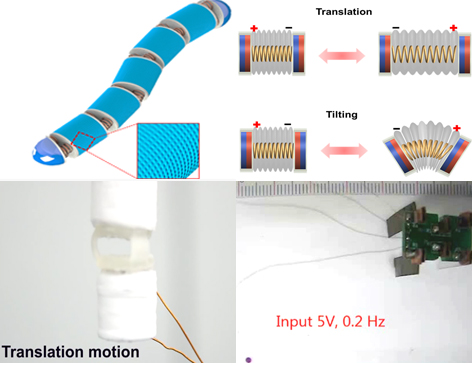
A5 Self Actuation Module
- No external drive required, miniaturization possible
- Next-generation micro medical robot drive technology
- Multifunctional module, sufficient force/mobility
- Biomimetic (earthworm) multiple degrees of freedom robot
- SMA and microelectromagnetic actuator
- Multi-joint structure, multiple degrees of freedom micro robot
- Wireless drive and charging mechanism
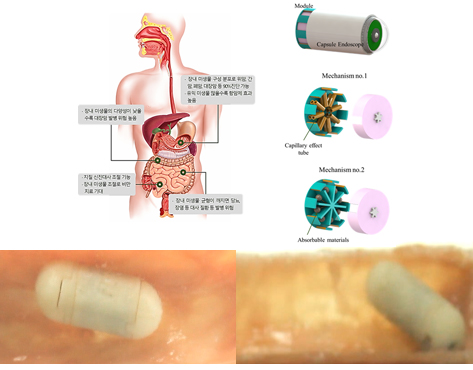
- Digestive type (endoscope combined) prototype application



-
- Family Sites
- rri.re.kr
- mrc.re.kr
- micronanorobot.re.kr
- jongohpark.com
-
- Contact US
- Korea Institute of Medical Microrobotics, 43-26, 208 Cheomdangwagi-ro, Buk-gu, Jeonnam-Gwangju, 61011, Republic of Korea
- Tel : ++82-62-530-5230
- Fax : ++82-62-971-5238
ⓒ KIMIRo. All rights reserved.