| 구동모듈 | 전신 | 국부 특정 신체기관 | 소화기관 |
|---|---|---|---|
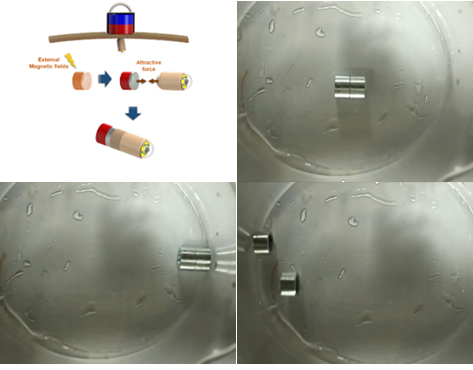
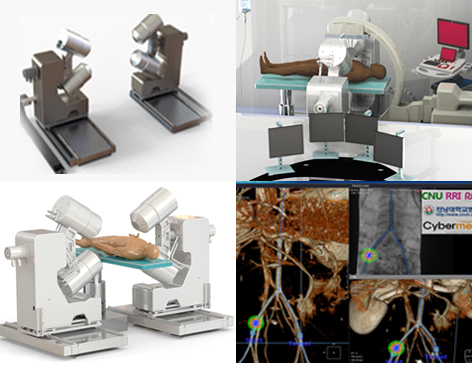
| 환부에 따라 선택 | A1이동형 전자기구동 |
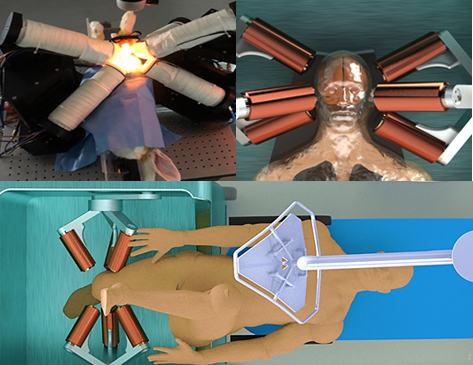
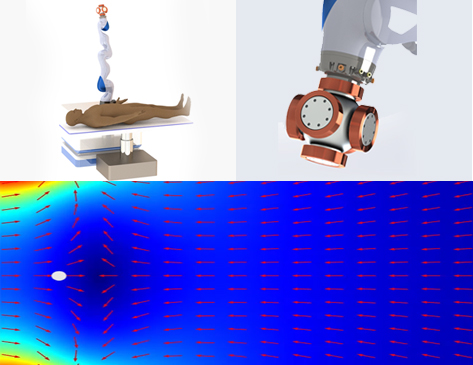
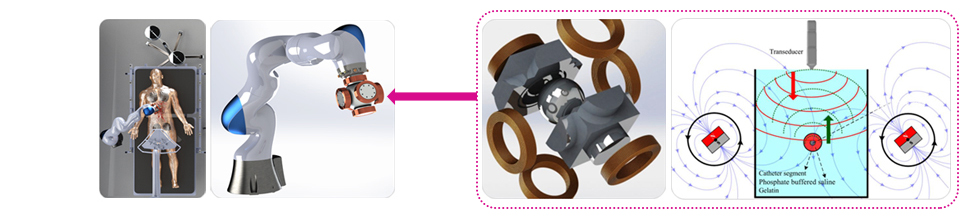
A2고정형 전자기구동 A3로봇형 전자기구동 A4초음파구동 |
A5자체구동 |
| 인식시각화 대상별 | 질환별 | |||
|---|---|---|---|---|
| 고형암 | 순환기 질환 | 소화기 질환 | 추가질환 | |
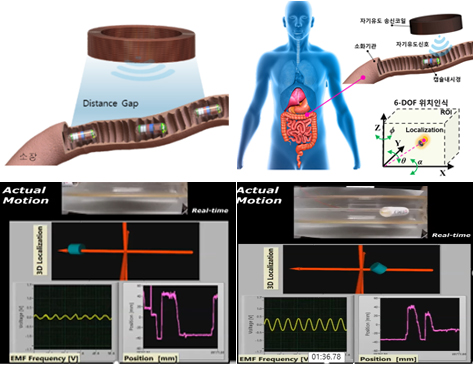
V1Meso-scale 인식 모듈 |
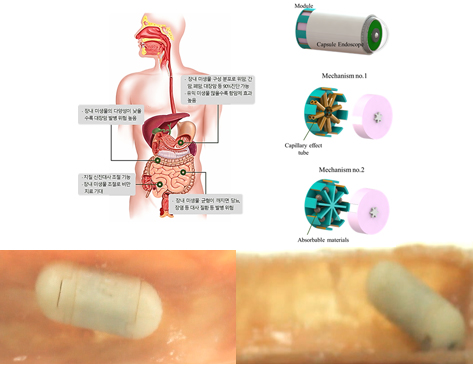
- 진단/치료 모듈의 소화기관 적용 - 기계적 시술 마이크로의료로봇 |
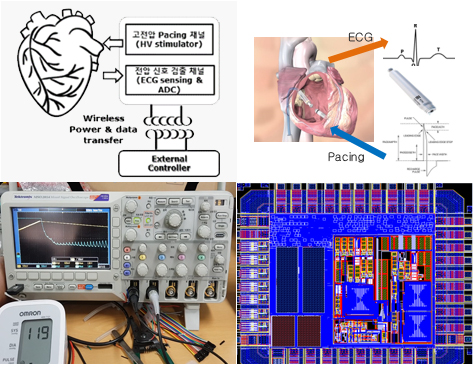
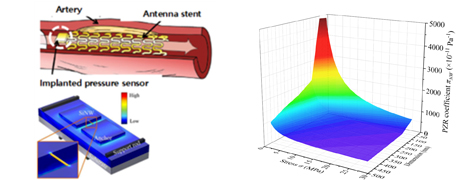
D1심박조율 진단 D2혈역학 진단 |
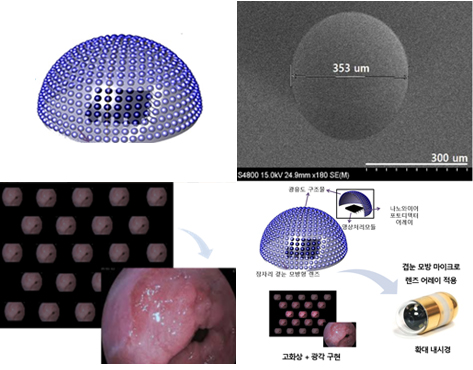
D3겹눈 진단 D4장측정 진단 D5지혈 패치 D6미생물채취전달 D7재구성 조립 |
- 근골격계 질환 - 인체 삽입형마이크로로봇 |
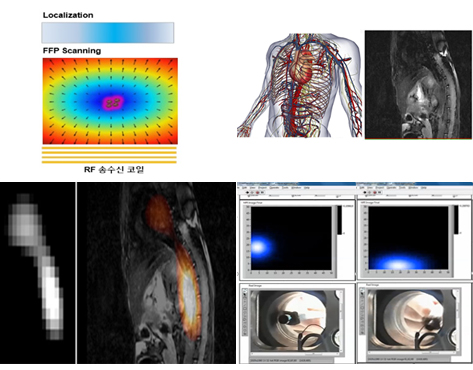
V2Micro-scale 인식 모듈 |
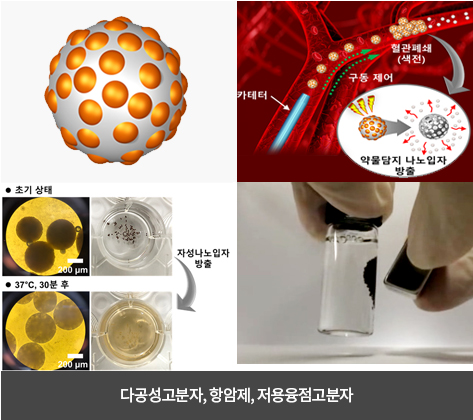
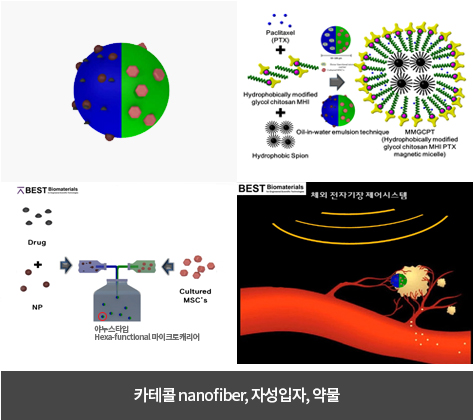
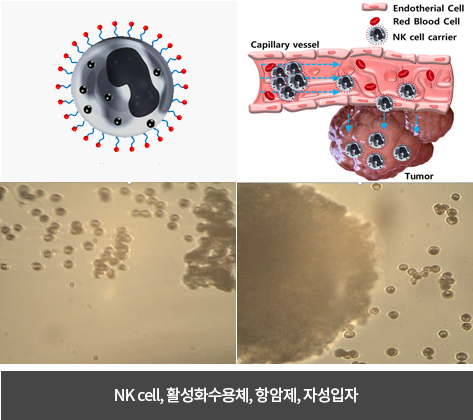
C1종양색전 캐리어 C3야누스약물캐리어 C4NK Cell 캐리어 |
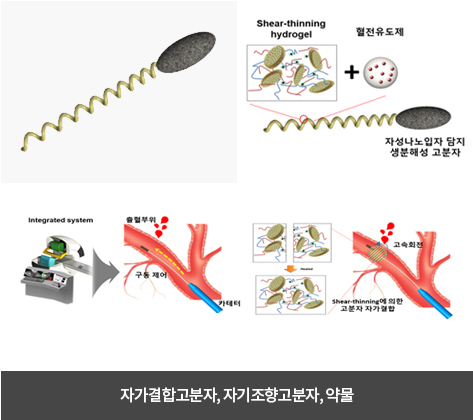
C1출혈색전 캐리어 |
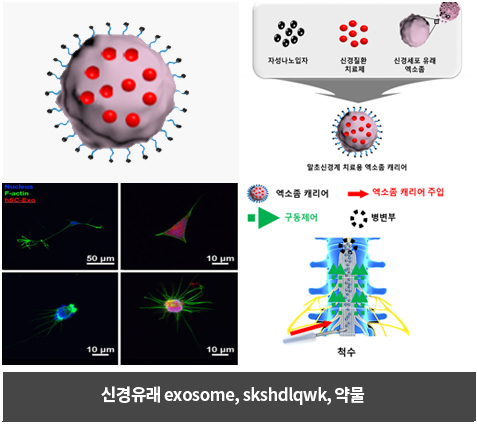
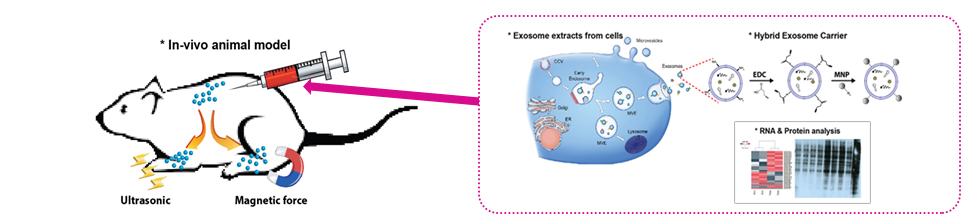
C5Exosome 캐리어 (신경계질환) |
|
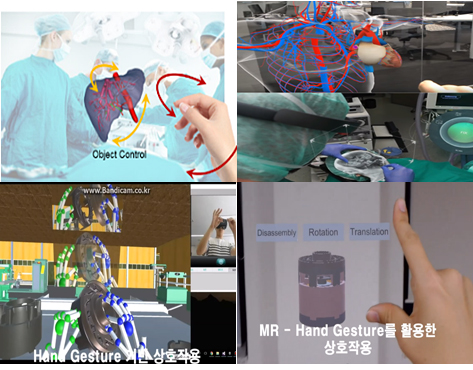
| 통합시스템 | V3Mixed Reality 시각화 모듈 |
|||

Korea Institute of Medical Microroboticss
Prof. Sarthak Misra (University of Twente, Netherland)
ⓒ KIMIRo. All rights reserved.